苏州科本电工有限公司专业提供工业类电线电缆----机器人电缆,伺服电缆,远距离信号传输电缆,拖链电缆,耐寒线缆,耐油线缆。
点击“New Cell”
选择“HandingPRO”后点击“NEXT”
点击“Next”
点击“NEXT
选择系统版本为“V8.3”选择完毕后点击“NEXT”
选择工具的位置,我们这里使用默认值,点击“NEXT”
选择机器人为“200ID/4S”,选择完毕后点击“NEXT”
选择外部轴的位置,这里我们暂时不需要外部轴故点击“NEXT”
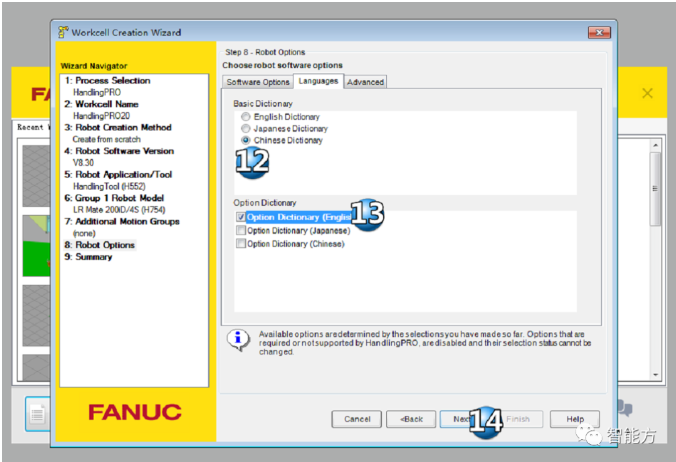
选项中按下图所示选择,即基础语言选择中文
选配语言选择英语,方便切换
点击“Finish”创建
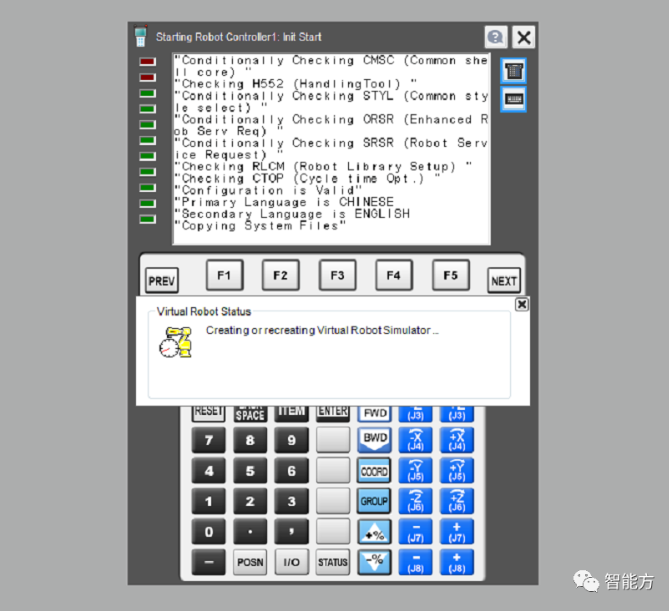
耐心等待···
创建完成后进入下图所示界面
按下图步骤选择“Single Robot Serialize Wizard”
点击进入
这里便是创建另一台机器人的向导界面,创建步骤与之上创建工作站方式类似