苏州科本电工有限公司专业提供工业类电线电缆----机器人电缆,伺服电缆,远距离信号传输电缆,拖链电缆,耐寒线缆,耐油线缆。
按下SELECT程序一览键显示目录画面
2.选择程序后,将功能项通过Next按键翻页,可点击Detail细节查看当前选择程序的具体属性
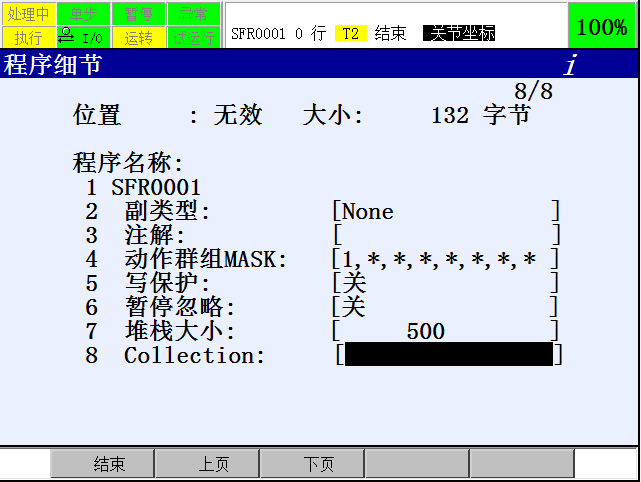
3.按下Detail细节功能键,属性界面如下图所示
4.与属性相关的信息
5.与执行环境相关的信息
1)程序名称(Program name)程序名称最好以能够表现其目的和功能的方式命名;例如,对第一种工件进行点焊的程序,可以将程序名取为“SPOT_1”
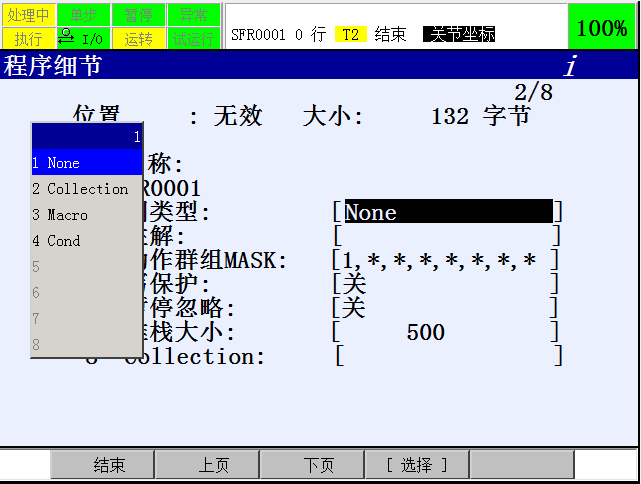
2)副类型(Sub type)None:无JB:工作程序,JOB,喷涂软件所用的主程序类型PR:处理程序,PROCESS,喷涂软件所用的主程序类型MR:宏程序,MARCOCH:条件程序,CONDITIONCO:集合程序,COLLECTION
3)注解(Comment)程序注释,注释内容需在16个字符以内
4)动作群组(Group Mask)运动组,用于定义程序中有哪几个组受控制。需要在该界面中将位置数据项(Position)设置为“False”时才能修改此项
5)写保护(Write protect)通过写保护来决定保护程序是否可以被改变ON:程序被写保护OFF:程序未被写保护
6)暂停忽略(Ignore pause)中断忽略,对于没有动作组的程序,当设定为ON,表示该程序在执行时不会被报警重要程度在SERVO及以下的报警、
急停、暂停而中断
7)堆栈大小(Stack size)程序运算空间大小,范围300~4000之间