如何察看机器人当前的位置信息?机器人的当前位置信息表示的是机器人
在空间上的位置和姿态。当前位置信息有两种显示方式:基于关节坐标值
的显示和基于直角坐标值的显示。
关节坐标值
基于关节坐标值的显示:通过各轴相对于基座侧的轴的旋转角来显示当前位置

直角坐标值
基于直角坐标值的显示:为了确定工具的位置和姿势,使用机器人手腕中所定义的工具坐标系和设定于空间
的直角坐标系来显示当前位置信息。

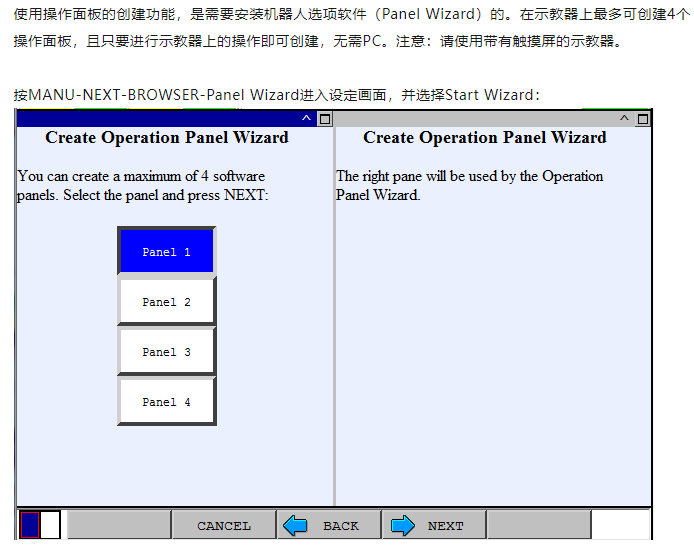
此处以R-2000iB/165F为例,如何才能显示机器人的当前位置呢?
步骤1:按下【MENU】(菜单)键,显示画面菜单





上图是创建好的一个操作面板。在这个自定义面板中,左侧的Lamp Status,Switch Button
和Press Button是写入的字符串模块,内容、字体大小、是否加粗、位置均可以自定义。右
侧的按钮图标可以从图标库里调用,在这个面板中第一个图标为指示灯图标,第二个是开关
图标,第三个是按钮图标。其作用如下:

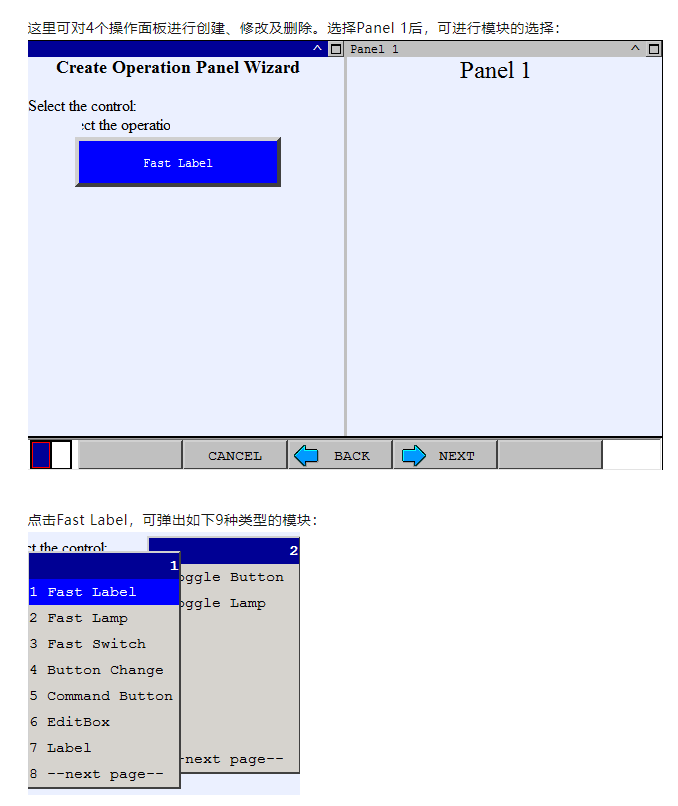
选择模块以后,便可以进行编辑了,并创建自定义的操作面板。当然创建及编辑的过程需要
花费一定的时间,也就需要用户根据操作手册来进行摸索了。
有了这样一个功能,用户可以按照自己的想法和思路,去创造属于自己的界面,在生产中实
现“可视化”。












